NVIDIA SpatialClaw 해설: 공간 추론 AI는 모델 재학습보다 코드 실행 인터페이스와 중간 검증 루프를 먼저 설계해야 하는 이유
엔비디아 SpatialClaw를 단순 연구 발표가 아니라 로봇·자율주행·AR용 공간 추론 에이전트 설계 관점에서 해설합니다. 코드 기반 행동 인터페이스, 5단계 실행 루프, 벤치마크 수치, 도입 조건과 한계를 함께 정리했습니다.
NVIDIA SpatialClaw 해설: 공간 추론 AI는 모델 재학습보다 코드 실행 인터페이스와 중간 검증 루프를 먼저 설계해야 하는 이유
발행일: 2026-06-22 | 카테고리: ai뉴스
1. 한 줄 문제 정의
핵심 한 줄: 로봇, 자율주행, AR처럼 물리 공간을 다루는 AI는 이미지를 설명하는 능력만으로 부족하고, 거리·방향·움직임을 계산하며 틀린 중간 판단을 고칠 수 있어야 합니다.
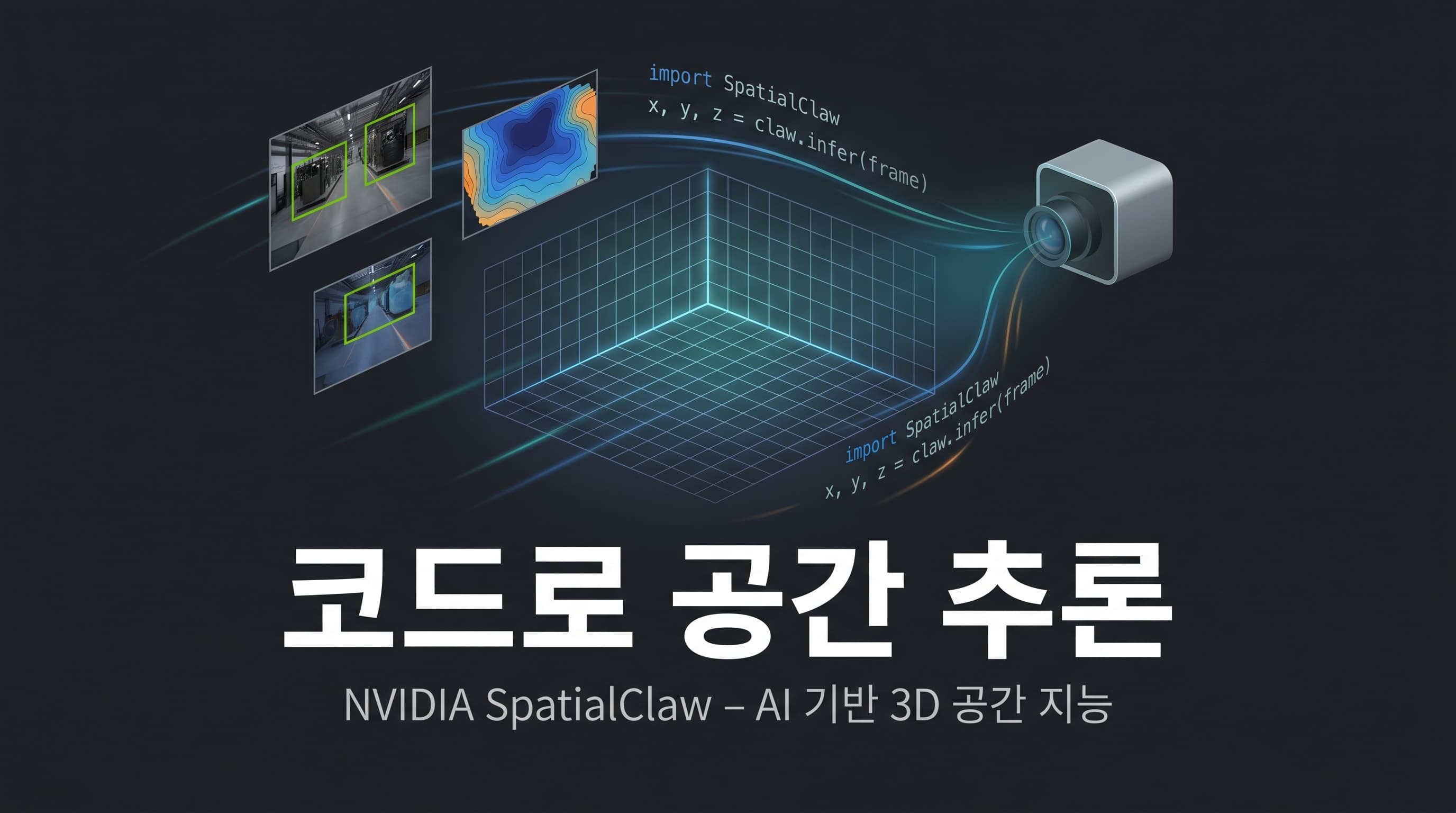
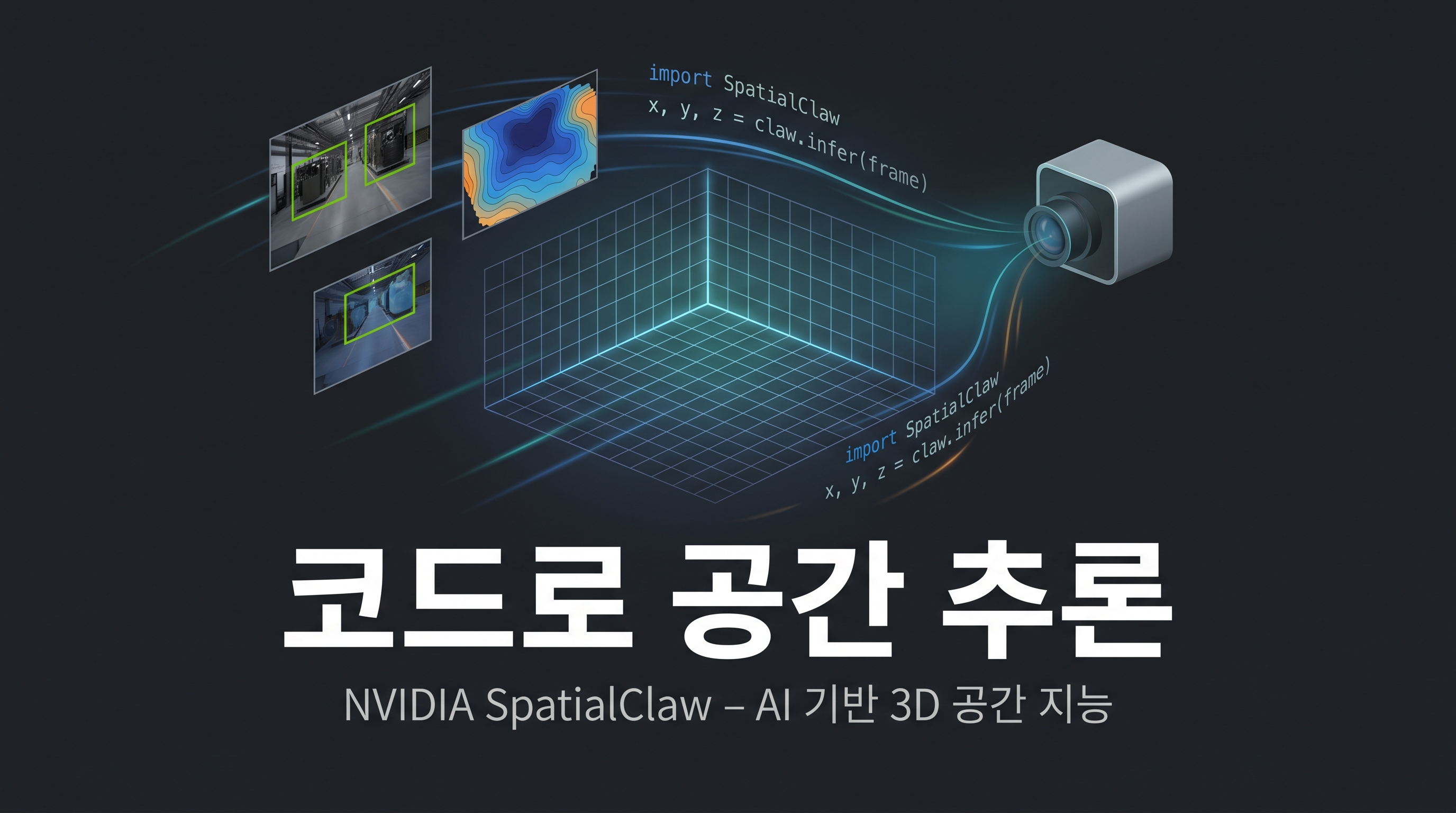
2026년 6월 22일 AI타임스는 엔비디아가 공간 추론 전용 에이전트 프레임워크 SpatialClaw를 공개했다고 보도했습니다. 공간 추론은 사물이 어디에 있고, 서로 얼마나 떨어져 있고, 어느 방향으로 움직이는지를 이해하는 능력입니다. 쉽게 말하면 카메라 화면을 보고 "저 컵이 테이블 왼쪽에 있다"를 넘어서 "로봇 팔이 어떤 경로로 집어야 안전한가"까지 판단하는 기술입니다.
이 글의 대상은 VLM, 로봇, 피지컬 AI, 자율주행, AR 서비스를 검토하는 개발자와 기술 리더입니다. 범위는 SpatialClaw의 구조와 도입 판단입니다. 논문 수식을 전부 해설하기보다, 왜 엔비디아가 "코드가 행동 인터페이스"라고 봤는지, 팀이 이 방식을 실험할 때 어떤 준비가 필요한지에 초점을 둡니다.
비적용 범위: 단순 이미지 캡션, 일반 챗봇, 텍스트만 처리하는 업무 자동화에는 SpatialClaw식 구조가 과합니다. 계산해야 할 공간 관계가 없으면, 상태 유지형 코드 실행 루프의 비용이 이익보다 커질 수 있습니다.
2. 먼저 결론
핵심 한 줄: SpatialClaw의 뉴스 가치는 "엔비디아가 또 프레임워크를 냈다"가 아니라, 공간 추론의 병목이 모델 크기보다 행동 인터페이스 설계에 있다는 점을 수치로 보여준 데 있습니다.
- 지금 주목해야 할 팀: 이미지·영상에서 거리, 방향, 다중 시점, 물체 이동을 계산해야 하는 로봇·자율주행·AR·공간 분석 팀
- 아직 관찰만 해도 되는 팀: 텍스트 요약, 문서 검색, 일반 업무 자동화처럼 공간 계산이 핵심이 아닌 팀
- 제 판단: SpatialClaw는 제품에 바로 붙이는 SaaS 기능이라기보다, 피지컬 AI 에이전트를 설계할 때 "도구 목록"보다 "도구 결과를 어떻게 조합하고 재검토하게 할 것인가"를 먼저 보라는 설계 신호입니다.
엔비디아와 KAIST AI 연구진의 논문은 SpatialClaw가 20개 공간 추론 벤치마크에서 평균 정확도 59.9%를 기록했고, 이전 공간 에이전트보다 11.2%포인트 높았다고 보고합니다. 이 수치보다 더 중요한 점은 별도 재학습 없이 같은 시스템 프롬프트, 도구 세트, 하이퍼파라미터로 6개 VLM 백본에서 개선을 확인했다는 점입니다.
그래서 도입 판단도 분명합니다. 모델을 다시 학습시킬 예산이 부족하지만 공간 계산을 더 잘하게 만들고 싶다면, SpatialClaw식 코드 실행 인터페이스를 실험할 가치가 있습니다. 반대로 GPU 도구 서버, Jupyter 커널 격리, 실행 로그, 안전 검사까지 운영할 준비가 없다면 지금은 논문과 구조를 학습하는 단계가 맞습니다.
3. 핵심 구조 분해
핵심 한 줄: SpatialClaw는 VLM 하나가 답을 바로 말하게 하는 방식이 아니라, VLM이 파이썬 코드를 한 셀씩 실행하며 공간 증거를 쌓는 구조입니다.
- VLM 백본: Qwen과 Gemma 계열처럼 이미 시각 입력을 이해하는 모델이 추론의 중심에 있습니다. 하지만 모델은 픽셀만 보고 바로 답하지 않고, 필요한 계산을 코드로 표현합니다.
- 상태 유지형 파이썬 커널: persistent kernel은 이전 단계에서 만든 변수, 마스크, 깊이 지도, 계산 결과를 기억합니다. 초보 개발자에게는 Jupyter Notebook에서 앞 셀 결과를 다음 셀이 계속 쓰는 구조라고 보면 됩니다.
- 지각 도구: GitHub README와 아키텍처 문서 기준으로 Reconstruct, SAM3, Depth Anything 3, Pi3 같은 도구가 입력 이미지와 영상에서 깊이, 분할, 기하 정보를 만듭니다.
- 과학 계산 라이브러리: NumPy, SciPy, Matplotlib이 도구 결과를 계산 가능한 데이터로 바꿉니다. 예를 들어 가까운 점을 찾을 때 KD-Tree를 쓰거나, 방향 판단에 내적을 사용할 수 있습니다.
- 피드백 루프: 코드 실행 결과, 오류, 새 변수, 시각화가 다음 관찰로 돌아옵니다. 에이전트는 그 결과를 보고 다음 코드를 고칩니다.
공식 아키텍처 문서의 5단계 루프는 Planning, Code Gen, Execute, Feedback, Answer Submission입니다. 여기서 중요한 설계는 실행 결과가 단순 로그로 끝나지 않는다는 점입니다. stdout, traceback, 변수 요약, show()로 등록한 이미지가 다시 관찰로 들어가 다음 추론에 영향을 줍니다.
4. 설계 의도 해설
핵심 한 줄: SpatialClaw는 도구를 더 많이 붙이는 대신, 도구 결과를 자유롭게 조합하고 중간에 고칠 수 있는 공간을 코드로 열어둡니다.
기존 공간 추론 에이전트는 대체로 두 방식 중 하나였습니다. 첫째, single-pass code는 처음부터 전체 파이썬 프로그램을 작성해 한 번 실행합니다. 유연하지만 중간 깊이 지도나 분할 결과를 보기 전에 전략을 확정해야 합니다. 둘째, structured tool-call은 JSON이나 XML처럼 정해진 형식으로 도구를 호출합니다. 안정적이지만 문제마다 새로 필요한 계산을 자유롭게 조합하기 어렵습니다.
SpatialClaw의 선택은 세 번째 길입니다. 코드를 API 호출의 껍데기가 아니라 행동 인터페이스 자체로 봅니다. 에이전트는 한 번에 완성된 프로그램을 쓰지 않고, 한 셀씩 실행하면서 "중심점 거리 계산이 부정확하니 표면 점 집합으로 다시 계산하자"처럼 전략을 바꿀 수 있습니다.
이 설계가 얻는 것은 표현력과 수정 가능성입니다. 공간 추론에서는 질문마다 필요한 계산이 달라집니다. "가장 가까운 물체"와 "카메라 쪽으로 이동하는 물체"와 "왼쪽으로 회전했는가"는 모두 다른 계산을 요구합니다. 정해진 도구 호출 목록만으로는 이런 조합을 전부 예상하기 어렵습니다.
대신 포기하는 것도 있습니다. 코드 실행 인터페이스는 안전 검사, 리소스 제한, 커널 격리, 로그 보존이 필요합니다. 논문과 README는 AST safety check와 persistent Jupyter kernel을 언급합니다. 제품팀이 이 방식을 가져오려면 모델 품질보다 실행 환경 보안과 관찰 가능성을 먼저 설계해야 합니다.
5. 근거 및 비교
핵심 한 줄: SpatialClaw의 비교 대상은 더 큰 모델 하나가 아니라, no-tool, single-pass code, structured tool-call 같은 서로 다른 행동 인터페이스입니다.
| 접근 | 동작 방식 | 강점 | 약점 | 추천 상황 |
|---|---|---|---|---|
| No-tool VLM | 이미지와 질문을 보고 바로 자연어로 추론 | 구성이 단순하고 빠름 | 거리·깊이·다중 시점 계산이 약함 | 낮은 위험의 시각 질의응답 |
| Single-pass code | 전체 분석 프로그램을 한 번 작성해 실행 | 코드 표현력은 확보 | 중간 증거를 보기 전에 전략을 확정 | 계산 경로가 명확한 반복 작업 |
| Structured tool-call | 정해진 JSON/XML 도구 호출로 분석 | 통제와 검증이 쉬움 | 새로운 계산 조합이 어렵고 스키마에 묶임 | 안정성이 최우선인 제한된 도구 자동화 |
| SpatialClaw code-as-action | 상태 유지 커널에 한 셀씩 코드를 실행하고 피드백을 반영 | 중간 결과 기반 수정, 도구 조합, 과학 계산이 유연함 | 실행 보안과 인프라 운영 부담이 큼 | 공간 계산이 성능 병목인 로봇·AR·영상 분석 |
공식 README와 논문 초록 기준 핵심 수치는 다음과 같습니다. SpatialClaw는 20개 공간 추론 벤치마크에서 평균 정확도 59.9%를 기록했고, 최근 공간 에이전트 대비 11.2%포인트 높았습니다. 벤치마크는 단일 이미지, 다중 시점, 일반 공간 추론, 영상 및 4D 추론, 일반 영상 이해를 포함합니다.
또 하나의 근거는 확장성입니다. 연구진은 Qwen과 Gemma 계열의 6개 VLM 백본, 27B에서 397B 규모 모델에서 일관된 개선을 보고했습니다. 이는 "특정 모델에만 맞춘 프롬프트 꼼수"보다 행동 인터페이스 자체가 성능에 영향을 준다는 주장에 힘을 줍니다.
반대 관점도 필요합니다. 이 결과는 연구 벤치마크의 정확도입니다. 실제 로봇 제품에서 안전하게 동작한다는 뜻은 아닙니다. 벤치마크 정답률, 실시간성, 물리 안전, 실패 복구, 사용자 책임은 서로 다른 문제입니다.
6. 실제 동작 흐름 / 단계별 실행 방법
핵심 한 줄: SpatialClaw를 실험하려면 모델보다 먼저 입력 데이터, 도구 서버, 커널 격리, 평가 기준을 준비해야 합니다.
- 문제를 공간 추론 문제로 좁힙니다. 예: "두 물체의 최단 거리", "카메라 기준 왼쪽 회전", "영상 속 객체가 가까워지는지"처럼 계산 가능한 질문으로 바꿉니다.
- 입력과 메타데이터를 준비합니다. 이미지, 영상 프레임, FPS, 프레임 인덱스, 카메라 정보가 있어야 시간·거리 추론이 가능합니다.
- 지각 도구를 선택합니다. 공식 문서는 GPU tool server가 Reconstruct, SAM3 같은 무거운 도구를 FastAPI 서비스로 제공한다고 설명합니다. 데이터셋 설정에서 도구가 필요 없으면 GPU 서버를 생략할 수 있습니다.
- 커널 안전 경계를 둡니다. 에이전트가 코드를 실행하므로 AST safety check, 파일 접근 제한, 네트워크 차단, 시간 제한, 메모리 제한을 실험 전부터 정해야 합니다.
- 기준선을 함께 실행합니다. no-tool, single-pass, structured tool-call과 비교해야 code-as-action이 실제로 이득인지 알 수 있습니다.
- 정답률만 보지 말고 실패 로그를 봅니다. 잘못된 마스크, 깊이 추정 오류, 좌표계 혼동, 프레임 선택 실패가 어디서 생겼는지 기록합니다.
# 공식 문서 흐름을 단순화한 실험 체크 예시
1. 입력: image_frames + metadata + question
2. 계획: 어떤 공간 증거가 필요한지 작성
3. 실행: Python cell로 segmentation / depth / geometry 계산
4. 피드백: stdout, 변수 요약, show() 이미지 확인
5. 수정: 계산 방식 또는 도구 조합 보정
6. 제출: ReturnAnswer(...)로 답변 확정
공식 Running 문서는 단일 머신 실험의 경우 GPU tool server를 실행한 뒤 python -m spatial_agent.entrypoints.run으로 데이터셋과 모델 설정을 넘기는 흐름을 안내합니다. 다만 실제 제품팀은 이 명령어 자체보다 "우리 데이터에서 어떤 실패가 반복되는가"를 보는 평가 설계를 더 중요하게 봐야 합니다.
7. 실수/함정(Pitfalls)
핵심 한 줄: SpatialClaw식 접근의 실패는 대부분 모델 답변보다 실행 환경, 좌표계, 중간 증거 검증에서 발생합니다.
- 실수 1: 코드 실행을 신뢰하고 샌드박스를 생략함
예방: AST 검사, 파일·네트워크 접근 제한, 시간 제한, 메모리 제한을 기본값으로 둡니다.
복구: 실행 로그를 보존하고 위험한 호출이 감지된 샘플은 답변을 폐기합니다. - 실수 2: 깊이 추정 결과를 실제 거리처럼 과신함
예방: monocular depth는 상대 깊이일 수 있으므로 카메라 보정, 스케일 기준, 신뢰도 범위를 함께 기록합니다.
복구: 절대 거리가 필요한 작업은 센서 데이터나 다중 시점 보정으로 재검증합니다. - 실수 3: segmentation mask가 틀렸는데 후속 계산만 정교하게 함
예방: mask 시각화를 show()로 되돌려 모델과 사람이 확인할 수 있게 합니다.
복구: 다른 프롬프트, 다른 프레임, 다른 분할 도구로 재시도하고 실패 유형을 라벨링합니다. - 실수 4: 벤치마크 평균 정확도만 보고 제품 성능으로 오해함
예방: 실시간 지연, 실패 시 정지 정책, 재시도 비용, 물리 안전 기준을 별도 지표로 둡니다.
복구: 제품 데이터셋에서 작은 shadow evaluation을 먼저 돌리고, 사람 검수 결과와 비교합니다. - 실수 5: structured tool-call을 무조건 낡은 방식으로 취급함
예방: 안전성과 감사가 더 중요한 업무는 정형 도구 호출이 더 나을 수 있음을 인정합니다.
복구: 고위험 액션은 structured tool-call로 묶고, 분석·계산 단계에만 code-as-action을 허용하는 혼합 구조를 검토합니다.
8. 강점과 한계
핵심 한 줄: SpatialClaw의 강점은 중간 증거 기반 수정이고, 한계는 연구용 실행 루프를 제품 안전 루프로 착각하기 쉽다는 점입니다.
- 강점: 별도 재학습 없이 행동 인터페이스만 바꿔 성능 향상을 보고했습니다.
- 강점: 한 셀씩 실행하므로 중간 결과를 보고 계산 방식을 바꿀 수 있습니다.
- 강점: NumPy, SciPy 같은 일반 계산 도구를 활용해 질문마다 다른 공간 계산을 구성할 수 있습니다.
- 강점: 20개 벤치마크와 6개 백본 모델에서 개선을 보여, 특정 데모 하나에 갇히지 않았습니다.
- 한계: GPU 도구 서버, vLLM 서버, Jupyter 커널, 평가 데이터가 필요해 운영 복잡도가 높습니다.
- 한계: 코드 실행은 보안과 비용 위험을 동반합니다. 특히 외부 입력을 처리하는 제품에서는 샌드박스가 필수입니다.
- 반례: 정해진 도구 몇 개만 안전하게 호출하면 되는 업무라면 structured tool-call이 더 단순하고 감사하기 쉽습니다.
9. 더 깊게 공부할 포인트
핵심 한 줄: SpatialClaw를 제대로 이해하려면 VLM 성능표보다 action interface, persistent kernel, tool feedback, spatial benchmark를 먼저 봐야 합니다.
- Action interface: 에이전트가 세상에 행동을 내보내는 형식입니다. 자연어, JSON 도구 호출, 코드 실행 중 무엇을 쓰느냐가 능력과 위험을 함께 바꿉니다.
- Persistent kernel: 이전 단계 결과가 다음 단계에 남는 실행 공간입니다. Jupyter Notebook처럼 변수와 그림이 누적됩니다.
- Perception primitives: SAM3, Depth Anything 3, Pi3처럼 픽셀을 마스크, 깊이, 3D 구조로 바꾸는 기본 도구입니다.
- Spatial benchmark: 단일 이미지 정확도만 보지 말고 다중 시점, 영상, 4D 추론에서 어디가 개선되는지 봐야 합니다.
- Runtime security: 코드 실행형 에이전트는 샌드박스, AST 검사, 리소스 제한, 감사 로그가 없으면 제품에 넣기 어렵습니다.
10. 참고자료
- AI타임스 - 엔비디아, 재학습 없는 공간 추론 AI '스페이셜클로' 공개 (2026-06-22, 확인일 2026-06-22)
- NVlabs/SpatialClaw 공식 GitHub 저장소 (확인일 2026-06-22)
- arXiv - SpatialClaw: Rethinking Action Interface for Agentic Spatial Reasoning (2026, 확인일 2026-06-22)
- SpatialClaw Architecture 문서 (확인일 2026-06-22)
- SpatialClaw Running Experiments 문서 (확인일 2026-06-22)
11. 실행 체크리스트 + 작성자 관점
핵심 한 줄: SpatialClaw식 구조의 완료 기준은 "코드가 실행됐다"가 아니라, 중간 증거가 검증되고 실패가 기록되며 위험 액션이 통제되는 것입니다.
- 우리 문제가 텍스트 추론이 아니라 거리, 방향, 움직임, 다중 시점 계산 문제인지 확인했다
- 입력 이미지·영상과 FPS, 프레임 인덱스, 카메라 정보 등 메타데이터를 정리했다
- no-tool, single-pass, structured tool-call 기준선을 함께 돌릴 계획을 세웠다
- 코드 실행 커널에 시간 제한, 메모리 제한, 파일 접근 제한, 네트워크 제한을 적용했다
- segmentation, depth, geometry 계산의 중간 결과를 사람이 확인할 수 있게 저장한다
- 평균 정확도와 별도로 지연 시간, 실패 복구, 안전 정지 기준을 측정한다
- 고위험 제품 액션은 code-as-action 결과만으로 바로 실행하지 않고 별도 승인 게이트를 둔다
Definition of Done: 같은 데이터셋에서 no-tool 또는 structured tool-call 기준선보다 의미 있는 정확도 개선이 있고, 실패 로그·중간 시각화·실행 샌드박스·사람 승인 기준이 모두 갖춰졌을 때 SpatialClaw식 실험을 1차 완료로 봅니다.
제 추천은 "공간 추론 R&D에는 적극 실험, 제품 액션에는 보수 적용"입니다. 연구팀과 피지컬 AI 팀은 SpatialClaw의 코드 기반 인터페이스를 꼭 살펴볼 가치가 있습니다. 하지만 로봇이 실제 물체를 움직이거나 차량·시설 제어에 연결되는 순간, 이 구조는 판단 보조 장치일 뿐 최종 액션 권한까지 자동으로 넘겨서는 안 됩니다.
공유하기
관련 글
UN AI Resource Hub 해설: AI 거버넌스는 선언보다 역량 격차·증거 패널·운영 체크리스트를 먼저 연결해야 하는 이유
UN Global Dialogue on AI Governance와 AI Resource Hub 출범을 개발자·조직 운영 관점에서 해설합니다. 선언문이 아니라 역량 격차, 과학 패널, 실행 체크리스트를 어떻게 하나의 운영 루프로 묶어야 하는지 정리했습니다.

화웨이 LogicFolding·기린 2026 해설: 반도체 경쟁은 공정 노드보다 회로 배치·전력 검증 경계를 먼저 봐야 하는 이유
화웨이가 같은 제조 공정에서 기린 2026의 집적도와 전력 효율 개선 데이터를 공개했다. 이 이슈를 EUV 대체 논쟁이 아니라 동일 공정 최적화의 검증 문제로 해설한다.

Amazon Mechanical Turk 신규 가입 중단 해설: AI 학습 데이터는 사람 라벨보다 출처·작업 로그·오염 검증을 먼저 설계해야 하는 이유
Amazon Mechanical Turk 신규 가입 중단은 사람 라벨링의 끝이 아니라, 출처와 작업 로그가 없는 인간 데이터의 한계를 보여준다. AI 학습·평가 데이터 팀이 라벨링 공급망을 다시 설계할 기준을 정리했다.
AQ 테스트 해보기
지금 내 AI 활용 능력이 어느 수준인지 3분 안에 확인해보세요. 인지력, 활용력, 검증력, 통합력, 윤리감을 한 번에 진단하고 맞춤형 인사이트를 받아볼 수 있습니다.
무료 AQ 테스트 시작하기